در روشهای Rule-based، مهندس بینایی ماشین باید ویژگیها (مانند لبهها، بافت یا هندسه) را به صورت دستی استخراج میکرد. در یادگیری عمیق، لایههای اولیه شبکه عصبی به صورت خودکار ویژگیهای سطح پایین (Low-level features) و لایههای عمیقتر، مفاهیم پیچیده (High-level features) را شناسایی میکنند.
این جمله شما که «در هوش مصنوعی، کیفیت تصویر حرف اول و آخر را میزند»، سنگبنای سیستمهای مدرن است. یک مدل دیپلرنینگ هرچقدر هم که پیچیده باشد، اگر ورودی آن دارای نویز، تاری (Motion Blur) یا بازه دینامیکی (Dynamic Range) ضعیف باشد، دچار خطای GIGO (Garbage In, Garbage Out) میشود.
دوربینهای Basler (بهویژه سری ace 2 و boost) به چند دلیل در پروژههای دیپلرنینگ ترجیح داده میشوند:
- ثبات بازتولید رنگ و کنتراست: برای آموزش مدل، تصاویر باید در طول زمان یکپارچه باشند تا شبکه دچار سوگیری (Bias) نشود.
- تکنولوژی PGI: مجموعهای از ویژگیهای دروندوربینی Basler که شامل بهبود وضوح (Sharpening) و حذف نویز است، بار پردازشی را از روی GPU کم کرده و دیتای “تمیز” به مدل تحویل میدهد.
- سازگاری با SDKهای پیشرفته: کتابخانه Pylon به راحتی با فریمورکهای AI مانند PyTorch و TensorFlow یا نرمافزارهای واسط مثل HALCON ادغام میشود
انواع متدهای دیپلرنینگ در کنترل کیفی
برای پیادهسازی این تکنولوژی در خط تولید، معمولاً از سه رویکرد استفاده میشود:
- طبقهبندی (Classification): تشخیص اینکه قطعه کلاً “سالم” است یا “معیوب”.
- آشکارسازی شیء (Object Detection): پیدا کردن مکان دقیق نقص (مثلاً یک ترک در ناحیهای خاص) و تعیین نوع آن.
- بخشبندی (Segmentation): دقیقترین حالت که پیکسلبهپیکسل محدوده نقص را مشخص میکند؛ عالی برای بررسی لکههای بسیار ریز.
- تشخیص ناهنجاری (Anomaly Detection): مدلی که فقط روی “قطعات سالم” آموزش میبیند و هر چیزی که با آنها متفاوت باشد را به عنوان خطا شناسایی میکند (بدون نیاز به دیتای حجیم از قطعات معیوب).
امروزه روند صنعت به سمت پردازش در لبه (Edge) است. به جای ارسال حجم عظیمی از داده به سرور، از دوربینهای هوشمند یا سیستمهای Embedded (مانند NVIDIA Jetson) در کنار دوربینهای Basler استفاده میشود تا تصمیمگیری در میلیثانیه و مستقیماً در کنار خط تولید انجام شود.
کنترل کیفی صنعتی امروز با ورود دیپلرنینگ (Deep Learning) دگرگون شده است. در گذشته، سیستمهای بینایی ماشین سنتی با قوانین صریح و تعریفشده کار میکردند، اما در برابر تغییرات نوری، بافتهای متنوع و نقصهای غیرمنتظره ناتوان بودند. فناوری هوش مصنوعی این محدودیت را از میان برده و اکنون سیستمها میتوانند بهصورت خودکار از دادههای تصویری یاد بگیرند که «سالم» و «معیوب» چه معنایی دارد.
چرا دیپلرنینگ ضروری است؟
- شناخت بافتهای پیچیده: شبکههای عصبی کانولوشنی میتوانند میان الگوهای طبیعی سطوح (مثل پارچه یا فلز برسخورده) و عیوب واقعی تمایز قائل شوند.
- مقاومت در برابر تغییرات محیطی: مدلهای آموزشدیده با دادههای متنوع نسبت به تغییر نور، زاویه، یا چربی سطح مقاوماند و خطاهای کاذب را به حداقل میرسانند.
- تشخیص ناهنجاریها: حتی زمانی که شکل دقیق نقص مشخص نیست، سیستمهای Anomaly Detection قادرند هر الگوی غیرعادی نسبت به نمونه سالم را شناسایی کنند.
نقش کلیدی دوربینهای Basler
کیفیت تصویر اساس موفقیت در دیپلرنینگ است. برخلاف تصور رایج، هیچ مدل هوش مصنوعی نمیتواند دادههای بیکیفیت را اصلاح کند.
دوربینهای Basler با استفاده از سنسورهای پیشرفته Sony CMOS (Pregius/Starvis)، ویژگیهای PGI Image Enhancement و فناوری Compression Beyond، تصاویری دقیق، پایدار و با جزئیات بالا تولید میکنند؛ دقیقاً همان چیزی که مدلهای یادگیری عمیق نیاز دارند.
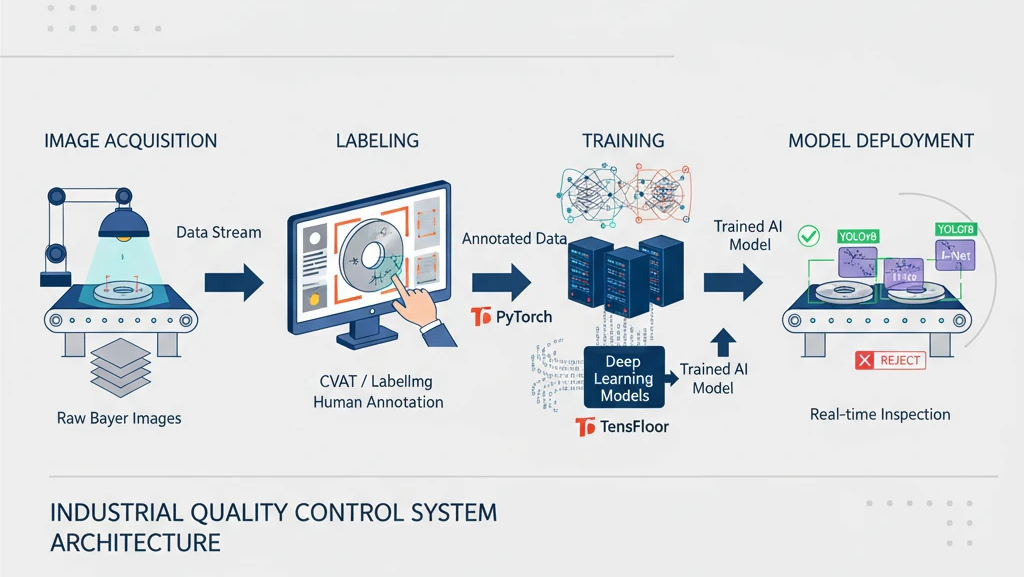
مراحل پیادهسازی سیستم کنترل کیفی هوشمند
- جمعآوری داده: نصب دوربین Basler در خط تولید و تهیه تصاویر متعدد با نورپردازی کنترلشده.
- برچسبگذاری: تفکیک دستی تصاویر سالم و معیوب توسط کارشناسان.
- آموزش مدل: استفاده از شبکههایی مانند U‑Net یا YOLO برای یادگیری عیوب.
- استقرار: اجرای مدل روی سیستمهای NVIDIA Jetson یا IPC صنعتی با پشتیبانی SDK باسلر.
کاربردهای واقعی
- بازرسی سطوح فلزی و رنگی در خودروسازی
- خواندن شماره سریالهای کمرنگ (Industrial OCR)
- درجهبندی مواد غذایی
- شناسایی اجزا روی بردهای الکترونیکی
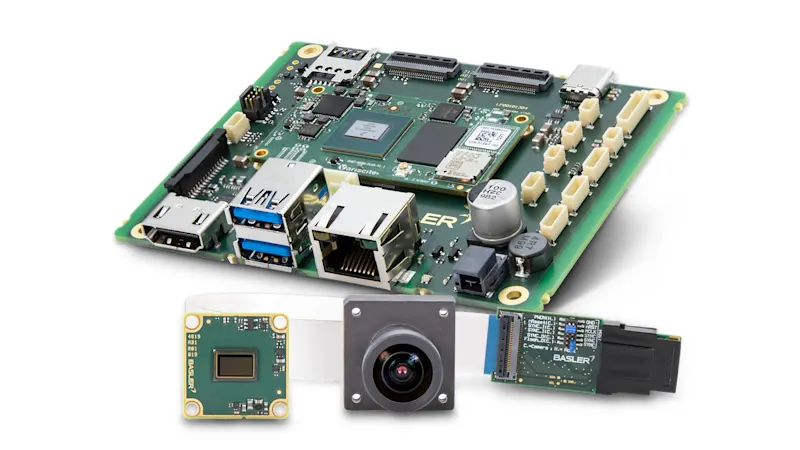
سختافزار پیشنهادی
- دوربین: Basler ace 2 Pro
- لنز: Basler Premium یا Computar
- پردازشگر: NVIDIA Jetson Orin Nano / NX
- نرمافزار: Pylon SDK و PyTorch

جمعبندی
دیپلرنینگ کنترل کیفی را از یک فرآیند ایستا به سامانهای هوشمند، خودکار و یادگیرنده تبدیل کرده است.
آینده خطوط تولید، مبتنی بر تصمیمگیری هوشمند در لحظه است و ابزارهای آن همین امروز در دسترساند.

دیدگاه خود را بنویسید